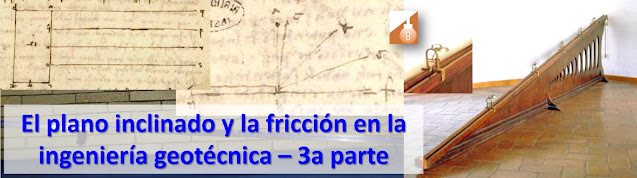
El Plano Inclinado y la Fricción en la Ingeniería Geotécnica – Primera Parte

Por: Santiago Osorio R.

Contenido de la Primera Parte
- Introducción
- La Fricción hacia el Siglo XVIII
- La Gravedad g
- El Concepto de ‘Masa’ m
- El Plano Inclinado
- Galileo Galilei y el Plano Inclinado
- El Plano Inclinado en el Análisis Geotécnico
Introducción
La publicación en 1776 del “Essai sur une Application des Règles de Maximis et Minimis á quelques Problèmes de Statique, relatifs à l’Architecture” de Charles Augustine Coulomb en Mémoires de Mathématique y de Physique, présentés à l’Académie Royale des Sciences par divers Savans, & lûs dans ses Assemblées, vol. 7, 1773, pp. 343-82, Paris (1776) y reimpreso en “Théorie des machines simples”, Paris (1821); ensayo que fue leído por Coulomb en dos sesiones el 10 de marzo y el 2 de abril de 1773, representa el nacimiento de la investigación científica sistemática en la mecánica de suelos, considerando al terreno y sus propiedades, como un material que falla a lo largo de un plano inclinado y que, al estar contenido por una estructura rígida (como un muro de mampostería), conforma una cuña de material para efectos de análisis geométrico (método que permite obtener el límite de estabilidad de un edificio granular mientras se asegura la estabilidad en todos los planos posibles) (Figura 1).
 |
| Figura 1. Modelo de Coulomb de análisis de la cuña de tierra a partir del plano inclinado, para el cálculo de los empujes activo y pasivo |
Este trabajo pionero de Coulomb en la literatura técnica, fue complementado algunos años después con la publicación de los resultados de sus importantes experimentos sobre la fricción en “Théorie des machines simples …” (Recueil des savants étr. de l'Ac. roy. des sc. 1781, 1785), aunque no estaba dirigido a presentar avances en el campo de la resistencia de materiales, si representó un gran aporte a la comprensión de la dinámica y en particular, a las leyes Newtonianas del movimiento.
Al igual que lo hicieron da Vinci, Galileo y Amontons en su momento, Coulomb utilizó sencillos modelos de planos de deslizamiento inclinados, sobre los que desplazaron objetos de distinta naturaleza y determinadas condiciones de prueba, para llegar a documentar como se inicia el movimiento y como posteriormente se reduce; se perfeccionó así una teoría (a veces denominada ley, pero no de aplicación universal) macroscópica de la fricción y sus aplicaciones.
Cuando se adaptó la teoría y las ‘leyes de la fricción’ a los medios granulares, inició formalmente la mecánica de suelos clásica, como se conoce gracias a los importantes trabajos de A. W. Skempton y J. Kérisel, entre los más reconocidos investigadores de la historia de la ingeniería geotécnica (ver mis blogs ‘Apuntes de geotécnica con énfasis en laderas’ y ‘Relatos de la geotecnia’).
La importancia de la comprensión del mundo físico y sus leyes, a través de los postulados filosóficos, de la investigación del plano inclinado y de la teoría macroscópica de la fricción, permite introducir una serie de modelos bidimensionales, de gran importancia para el análisis estático en la mecánica de suelos y rocas, y más general, en la ingeniería geotécnica; a partir de expresiones geométricas, trigonométricas y de algunas propiedades físicas de los materiales estudiados. En este relato de la geotecnia, se aborda de forma fragmentada en varias entradas, esta dimensión científica.
La Fricción hacia el Siglo XVIII
Cuando en 1779 la Academia Francesa de Ciencias relanzó su premio sobre “la fricción y la rigidez de las cuerdas (sur le frottement et sur la roideur des cordes)”, Coulomb sabía que no se conformaría con pruebas “hechas a pequeña escala en un gabinete de física”. La Academia “requiere que las leyes de fricción y el examen de los efectos resultantes de la rigidez de las cuerdas se determinen a partir de experimentos reales y se lleven a cabo a gran escala. Exige además que los experimentos sean aplicables a las máquinas utilizadas en la marina, tales como la polea, el cabrestante y el plano inclinado”.
¿De qué se trata el problema? La fricción plantea muchos problemas en la vida práctica de los ingenieros. Entonces, cuando se lanza un barco que sale del astillero, no es raro que el lanzamiento salga mal, arruinando meses de trabajo. A veces, el roce de los costados de la barca de madera contra sus soportes, también de madera, provoca un sobrecalentamiento tal que se produce un incendio. Otras veces la fricción es tan grande que el galeón se detiene a mitad de camino. Además, ¿cómo se comportan los cabos de los barcos en las poleas?
La Academia Francesa en 1779 ofreció un premio de 1000 louis d'or a la mejor investigación sobre la fricción. Dos años más tarde, Coulomb, el ganador de ese premio, fue doblemente remunerado por la Academia por sus destacadas investigaciones. Los resultados de su trabajo se publicaron por primera vez en 1785; fueron reeditados con suplementos en 1821 después de su muerte. Coulomb estaba bien situado para realizar este tipo de investigación. Su actividad en el campo de la fricción fue impulsada por el gobierno francés, que se dio cuenta de la necesidad de información más precisa para la industria de máquinas en expansión, para el lanzamiento de barcos y para el diseño de instrumentos de precisión.
Como teniente del Cuerpo de Ingenieros, acababa de ser destinado a Rochefort, donde dirigían el emplazamiento del fuerte en la isla de Aix. Sin embargo, en Rochefort existe una importante Corderie Royale donde se fabrican cabos para la marina y el comandante del puerto pone instalaciones y trabajadores a disposición de Coulomb. Esto le permitirá realizar “experimentos reales y hechos en tamaño (real)”. Durante meses estudió el comportamiento de cuerdas en poleas, grúas y cabrestantes; compara cuerdas nuevas y usadas, secas o empapadas en agua salada; finalmente, hace frotar bandejas de madera seca o aceitada, metal y otras sustancias. Su “Théorie des machines simples”, que reúne todos sus resultados experimentales, le permite ganar el Premio de la Academia en 1781.
La historia del estudio de la fricción hasta tiempos de Coulomb, brinda una amplia exposición en la ingeniería geotécnica, acerca de cómo se idearon los diferentes modelos de análisis matemático y experimentos científicos, que finalmente conducirían a la teoría de la resistencia al corte que, a su vez, hoy día se reconoce encriptada en su Essai y se atribuye a Coulomb, a menudo también conocida como la teoría de Mohr-Coulomb, a partir de los trabajos de Karl von Terzaghi en el siglo XX.
La Gravedad g
La gravedad es una de las cuatro fuerzas de la naturaleza junto con el electromagnetismo, la fuerza nuclear débil y la fuerza nuclear fuerte (Figura 2). Coloquialmente, la gravedad es una fuerza de atracción que actúa entre todos los objetos físicos con materia (masa) o energía. La gravitación o gravedad es un fenómeno natural por el cual todos los cuerpos físicos son atraídos entre sí. Se reconoce y experimenta como el agente que se encarga de determinar el peso de los objetos y las causas físicas por las cuales los objetos caen cuando son lanzados de determinada altura.
 |
| Figura 2. Interacciones fundamentales en la naturaleza |
En la física moderna, la gravitación se describe con mayor exactitud por la teoría de la relatividad propuesta por Albert Einstein (1879-1955), quien describe el fenómeno de la gravedad como “una manifestación de la distorsión de la geometría del espacio-tiempo bajo la influencia de los objetos que lo ocupan y no como una fuerza”.
El filósofo griego Aristóteles dijo que los objetos caen porque cada uno de los cuatro elementos (tierra, aire, fuego y agua) tenía su lugar natural, y estos elementos tenían tendencia a regresar a su lugar natural. Así, los objetos que estaban hechos de tierra querían volver a la Tierra, mientras que el fuego, por ejemplo, se elevaba hacia el cielo. Esta visión de por qué caen los objetos reinó hasta la revolución científica que comenzó en el Renacimiento.
El poeta y filósofo romano Lucrecio (c. 99-55 a.C.), explicó en el año 55 a.C. que la velocidad de los objetos en caída se reduce solo mediante resistencia hidrodinámica o aerodinámica y que los cuerpos livianos caen más lentamente por ese motivo, pero que todos los cuerpos deben caer a la misma velocidad en vacío. Según Aristóteles (384-322 a.C.), los cuerpos pesados deben caer al suelo más rápidamente que los livianos, ya que se hunden en el agua mientras que los más livianos se elevan. En 1554, Giovanni Battista Benedetti (1530-1590) refutó la hipótesis de Aristóteles, demostrando que dos esferas idénticas conectadas con firmeza entre sí mediante una varilla (sin masa) caen a la misma velocidad. La idea de que el cuerpo se mueve a una velocidad constante al caer también proviene de Aristóteles. En 1590, Galileo Galilei (1564-1642) presentó las leyes de la caída libre: En vacío, todos los cuerpos caen a la misma velocidad, independientemente de su forma, composición o masa. Su caída libre es proporcional al tiempo de la caída, mientras que la distancia de la caída es proporcional al cuadrado del tiempo de la caída. Esto significa que la aceleración es igual para todos los cuerpos en el mismo punto. En 1659, Robert Boyle (1627-1691) confirmó mediante experimentos que los cuerpos con masas diferentes caen a la misma velocidad en vacío.
El desarrollo moderno de la Teoría Gravitacional comenzó a fines del siglo XVI y comienzos del siglo XVII con el trabajo de Galileo Galilei (1564-1642) y su experimento en la Torre de Pisa al dejar caer bolas desde ella y poco después con cuidadosas mediciones de las bolas rodando en un plano inclinado, Galileo mostró que la gravedad acelera todos los objetos a la misma velocidad y a su vez postuló que “la resistencia del aire es la razón por la cual los objetos ligeros pueden caer despacio en la atmósfera”. Este trabajo sentó las bases para la formulación de la teoría de la gravitación de Newton.
Con la publicación de Philosophia naturalis principia mathematica el 5 de julio de 1687, el matemático inglés Isaac Newton (1643-1727) presentó la Ley de Gravitación Universal y las leyes de la Mecánica Clásica, confirmando lo afirmado por Galileo: “el universo es un libro escrito en lenguaje matemático”, y en ésta indicó: “Deduje que las fuerzas que mantienen a los planetas en sus orbitas, deben ser recíprocos a los cuadrados de sus distancias a los centros sobre los que giran, y de ese modo comparé la fuerza necesaria para mantener la Luna en su órbita con la fuerza de la gravedad en la superficie de la Tierra” (Figura 3).
 |
| Figura 3. Ley de la gravitación universal postulada por Isaac Newton. G = constante de gravitación universal = 6,673484.10-11 N.m²/kg² |
En la Mecánica, la gravedad es la fuerza con que la Tierra atrae a todos los cuerpos hacia su centro (visión de Isaac Newton). De esta fuerza se genera la aceleración que recae sobre los objetos que son traídos hacia la Tierra. El valor de medición de la aceleración gravedad aprobado por el Sistema Internacional es de 9,81 m/s2.
La gravedad es una de las cuatro fuerzas, o interacciones, o campos fundamentales observadas en la naturaleza. Es la responsable de los movimientos que se observan en el universo, como la órbita de los planetas en torno al Sol, o la de la Luna alrededor de la Tierra. Gracias a la gravedad tenemos la sensación de peso.
El Concepto de ‘Masa’ m
Las magnitudes físicas se han clasificado en magnitudes fundamentales y magnitudes derivadas. Las fundamentales son las que se pueden definir con independencia de las demás. El Comité Internacional de Pesas y Medidas estableció siete magnitudes fundamentales: longitud, masa, tiempo, corriente, temperatura, intensidad luminosa y cantidad de sustancia. Éstas son las estrictamente necesarias para definir todas las demás magnitudes de la física. Las magnitudes derivadas son las que se obtienen con la combinación adecuada de las magnitudes fundamentales. Entre éstas se encuentra el área, el volumen, la velocidad, la densidad, etc. En la mecánica se utilizan tres magnitudes fundamentales: longitud, masa y tiempo. Combinándolas en forma adecuada obtenemos las demás magnitudes derivadas: velocidad, aceleración, fuerza, trabajo, potencia, etc.
El término ‘masa’ proviene del latín massa que, a su vez, procede del griego madza. Para designar a un pastel que se realizaba con harina. Arquímedes (287-212 a.C.) usó la palabra ‘masa’ para referirse a un bulto o bloque. En los escritos de Aristóteles, la palabra ‘materia’ originalmente significaba madera. En el siglo XIII Aegidius Romanus (1243-1316), discípulo de Tomás de Aquino (1224-1274), concibió la idea de cuantitas materiae (cantidad de materia) como una medida de masa o de materia, independientemente de las determinaciones de volumen y peso. A lo largo de la historia los términos materia y masa se han considerado sinónimos.
Galileo consideraba el término ‘masa’ como otro nombre para la materia misma y señaló la diferencia entre masa y peso en forma implícita. Giovanni Battista Baliani (1582-1666) (amigo de Galileo, capitán de arqueros y senador genovés) lo hizo explícitamente, al establecer la diferencia entre moles y pondus (peso). Posteriormente, Newton en su Principiae, precisó la diferencia entre masa y peso a partir de los conceptos de densidad que planteara Robert Boyle (1627-1691) en sus trabajos sobre la densidad de los gases. Newton al trabajar con péndulos, llegó a la conclusión de que el peso era proporcional a la masa. Esta definición de masa inercial, al igual que su definición de fuerza como “cualquier acción sobre un cuerpo que cambia o tiende a cambiar su estado de movimiento o de reposo en línea recta”, presenta cierta circularidad desde el punto de vista lógico; así lo comprendió y explicó claramente Ernst Mach (1838-1916) en 1883, en la primera edición de su influyente tratado de mecánica clásica (Die Mechanik in ihrer Entwicklung (Desarrollo histórico-crítico de la mecánica), Leipzig, 1883).
En el siglo XVII el concepto de masa adquirió un nuevo significado cuando se le asoció a la propiedad de la inercia y se descubrió su relación con la gravedad. Se podría definir en forma tentativa la masa de un cuerpo a través de su peso a nivel del suelo. Newton fundamenta su construcción del mundo físico en cuatro magnitudes físicas y algunos principios elementales: de las magnitudes, tres son fundamentales: el espacio (s), el tiempo (t) y la masa (m). La cuarta magnitud, derivada, es el impulso o la cantidad de movimiento, que es definido por Newton como el producto de la masa por la velocidad (mv).
La noción de masa tiene su origen en la combinación de dos leyes (Figura 4): la ley de gravitación universal y la segunda ley de Newton. De acuerdo a la primera, la atracción entre dos cuerpos es proporcional al producto de dos constantes (definidas como masa gravitatoria), razón por la cual puede decirse que la masa gravitatoria constituye una propiedad de la materia gracias a la cual dos cuerpos consiguen atraerse entre sí. La masa que aparece en la formulación de las leyes de la mecánica clásica es la denominada masa inercial, mientras que la que aparece en relación con el peso de un cuerpo es la denominada masa gravitatoria. De acuerdo con la segunda ley de Newton, si sobre un cuerpo actúa una fuerza, éste adquiere una aceleración directamente proporcional a la fuerza aplicada. La constante de proporcionalidad (entre la fuerza y la aceleración) es la masa inercial del cuerpo. La masa gravitacional es la característica de un cuerpo responsable de crear una fuerza de atracción sobre otro cuerpo. Ambas constantes tienen el mismo valor y se representan mediante un mismo símbolo, m, al cual llamamos simplemente masa del cuerpo.
 |
| Figura 4. Representación del concepto de ‘masa’ |
El conjunto de descripciones que se asocian en mecánica clásica con el término “masa” podría ser el siguiente:
- La masa es la cantidad de materia o sustancia que posee un cuerpo u objeto material.
- Esa cantidad de materia que posee un cuerpo está en relación directa con la capacidad que el mismo cuerpo posee para resistirse a un cambio en su estado de movimiento.
- La masa existente en cada cuerpo es proporcional a la gravedad que sucede en todos los cuerpos.
- La masa es independiente de la posición y del estado de movimiento de los cuerpos. Es una propiedad universal de los cuerpos.
- La masa es una propiedad escalar característica de los objetos materiales.
- Es posible atribuir a los objetos un valor escalar m, mediante algún procedimiento experimental, que podrá ser determinado en relación a un objeto patrón.
- Los valores de la cantidad escalar m asignados a los distintos objetos cumplen las propiedades de aditividad y transitividad.
- La masa de un cuerpo puede determinarse empíricamente mediante diversos procesos que consistan en medir magnitudes que estén en una relación funcional con la masa, en las distintas leyes fundamentales en las que ésta está incluida.
- La masa total de un sistema aislado permanece constante a través del tiempo.
El Plano Inclinado
Los planos inclinados han sido utilizados por la humanidad desde tiempos prehistóricos para desplazarse o mover objetos pesados, inclusive la mitología hace alusión a ellos. Las carreteras en pendiente y las calzadas construidas por antiguas civilizaciones como la romana, son ejemplos de los primeros planos inclinados que han sobrevivido hasta nuestros días y demuestran que los constructores comprendieron el valor de este dispositivo para mover personas y objetos cuesta arriba y abajo. Se cree que las pesadas rocas utilizadas en estructuras de piedra antiguas como Stonehenge (c. 3100 – 2000 a.C.) se movieron y colocaron en su lugar utilizando planos inclinados hechos de tierra, aunque es difícil encontrar evidencia de tales rampas temporales de construcción (Figura 5).
 |
| Figura 5. El método del rey danés Frederick VI para levantar piedras angulares (capstones) y probablemente una de las primeras representaciones de la hipótesis del rodillo y el plano inclinado (1857) |
Las pirámides egipcias (c. 3000 a.C.) se construyeron utilizando planos inclinados, mediante un complejo sistema de rampas y poleas que pudieron haber utilizado los egipcios para construir las antiguas pirámides hace unos 4500 años en una cantera de caliza en el desierto oriental del país. El sistema elevó bloques de piedra que pesaban varias toneladas cientos de pies en el aire a través de enormes trineos, según creen los arqueólogos. Esta misma tecnología pudo haber permitido a los egipcios transportar bloques por pendientes empinadas para construir la Gran Pirámide, la única maravilla del mundo antiguo sobreviviente. La antigua rampa fue descubierta en la cantera de Hatnub por investigadores del Instituto Francés de Arqueología Oriental en El Cairo y la Universidad de Liverpool. Estaba flanqueado por dos escalinatas bordeadas de huecos para postes, a los que se amarraban cuerdas para arrastrar los enormes bloques de piedra. Los trabajadores subieron las escaleras a ambos lados del bloque, tirando de la cuerda a medida que avanzaban, un sistema que alivió parte de la carga de la enorme carga. Los grandes postes de madera, que medían hasta un pie y medio (0,5 metros) de diámetro, eran clave para el sistema (Figura 6).
 |
| Figura 6. Transporte de bloques de roca para la construcción de una pirámide utilizando un plano inclinado |
Las rampas de asedio como el agger romano de Masada (siglo I a.C.) permitieron a los ejércitos antiguos superar las murallas de las fortalezas. Los antiguos griegos construyeron una rampa pavimentada de 6 km (3,7 millas) de largo, el Diolkos (del griego, ‘a través’ y ‘máquina de arrastre’) (c. 600 a.C. – siglo I d.C.), para arrastrar los barcos por tierra a través del istmo de Corinto (Figura 7), reino fundado por Sísifo, cuyo castigo en el inframundo, consistió en empujar una enorme roca cuesta arriba por una ladera empinada, pero antes de que alcanzase la cima de la colina la roca siempre rodaba hacia abajo, y Sísifo tenía que empezar de nuevo desde el principio, una y otra vez (Figura 8 Izquierda)).
 |
| Figura 7. Diolkos griego. Rampa para arrastrar barcos en el istmo de Corinto |
 |
| Figura 8. Representación de Sísifo empujando la roca cuesta arriba (izquierda); Plano inclinado con diagrama de cuerpo libre de elemento en reposo sobre él (centro). La fuerza normal N, reacción del plano o fuerza que ejerce el plano sobre el bloque depende del peso del bloque, la inclinación del plano y de otras fuerzas que se ejerzan sobre el bloque; Efectos del desplazamiento de una roca de grandes proporciones sobre una ladera en Italia (derecha) |
Como mecanismo de defensa, el plano inclinado ha servido también a la humanidad desde sus primeros días (Figura 9). Geométricamente, un plano inclinado es una superficie diagonal sobre la cual los objetos pueden estar en reposo, deslizarse o rodar hacia arriba o hacia abajo (Figura 8 (centro)). El plano inclinado fue la última de las siete máquinas simples clásicas en ser reconocida como una máquina. Esto probablemente se deba a que es un dispositivo pasivo e inmóvil (la carga es la parte móvil), y también a que se encuentra en la naturaleza en forma de pendientes y colinas. Aunque entendieron su uso para levantar objetos pesados, los antiguos filósofos griegos que definieron las otras seis máquinas simples (una máquina simple usa una sola fuerza aplicada que trabaja contra una sola fuerza de carga. Ignorando las pérdidas por fricción, el trabajo realizado en la carga es igual al trabajo realizado por la fuerza aplicada) no incluyeron el plano inclinado como una máquina (una máquina es cualquier cosa que haga que una fuerza sea mayor).
En el siglo III a.C., filósofos y matemáticos se ocuparon del relativamente sencillo estudio de las máquinas simples que representan gran posibilidad de control como la palanca, la polea, engranajes, plano inclinado y de las combinaciones entre estas. Las investigaciones permitieron el aislamiento de los elementos esenciales del funcionamiento de las máquinas y facilitaron la formulación de conceptos y principios con que sistematizar deductivamente las leyes de operación. Sin embargo, la relación entre geometría, máquinas y experimentación siguió un camino tortuoso hasta alcanzar el éxito con el mecanicismo del siglo XVII.
 |
| Figura 9. Sistema de defensa perimetral de las fortificaciones romanas (fossa, agger y vallum) utilizando el plano inclinado |
Este punto de vista persistió entre algunos científicos posteriores; en 1826 Karl von Langsdorf escribió que un plano inclinado “... no es más una máquina que la pendiente de una montaña.” El problema de calcular la fuerza requerida para empujar un peso hacia arriba en un plano inclinado (su ventaja mecánica) fue intentada por los filósofos griegos Garza de Alejandría (c. 10 – 60 d. C.) y Pappo de Alejandría (c. 290 – 350 d. C.), pero se equivocaron. No fue hasta el Renacimiento que el plano inclinado se resolvió matemáticamente y se clasificó con las otras máquinas simples. El primer análisis correcto del plano inclinado apareció en la obra “De ratione ponderis” del enigmático autor del siglo XII-XIII Jordanus de Nemore (matemático y físico alemán que se unió a la orden Dominica en París c. 1220), sin embargo, su solución aparentemente no fue comunicada a otros filósofos de la época. A diferencia de Pappo, Jordanus no relaciona la fuerza necesaria para mover un cuerpo en un plano inclinado con la fuerza necesaria para moverlo en la horizontal: la compara, por así decirlo, directamente con las fuerzas en dos planos inclinados diferentes reduciéndolas a movimientos verticales. Pappo llega a un resultado incorrecto debido a que no tuvo la habilidad de descomponer el peso en dos componentes, paralela y perpendicular respectivamente, al plano inclinado. Un procedimiento que recién estaría disponible a partir de las demostraciones de Stevin y de Galileo, cerca de 1600. Así se unen los elementos necesarios para comprender la originalidad de la demostración propuesta por Galileo en De motu. Como Jordanus, Galileo aísla los movimientos verticales; pero lo hace de una manera totalmente diferente, introduciendo una palanca doblada.
Jordanus, utilizando el principio de los trabajos virtuales de Thabit ibn Qurra, en su Proposición 9 en Elementa Jordani super demostrationem ponderum (Elementos de Jordano para las demostraciones de los pesos), establece que la gravedad según la posición es la misma en todos los puntos del plano. En efecto, para una longitud (o distancia) dada sobre el plano, en cualquier posición le corresponde el mismo segmento horizontal y el mismo vertical. Esto significa que la oblicuidad de un plano inclinado es constante a lo largo del mismo. En la Proposición 10, demuestra que dos pesos ubicados en planos inclinados de diferente inclinación tienen la misma “fuerza de descenso”, si se verifica entre ellos que la proporción entre los pesos es igual a la proporción entre las longitudes de los planos (Figura 10). En la ley de Jordanus si la proporción de los pesos es igual a la proporción entre las longitudes, la “fuerza del descenso” (o gravedad según la posición) para ambos cuerpos será la misma y, por lo tanto, si están vinculados por una cuerda, permanecerán en equilibrio.
 |
| Figura 10. Ley del plano inclinado de Jordanus de Nemore |
Girolamo Cardano en 1570, propuso la solución incorrecta de que la fuerza de entrada es proporcional al ángulo del plano. Luego, a fines del siglo XVI, Michael Varro (1584), Simon Stevin (1586) y Galileo Galilei (1592) publicaron tres soluciones correctas en diez años. Aunque no fue la primera, la derivación del ingeniero flamenco Simon Stevin es la más conocida, por su originalidad y uso de un collar de cuentas (Figura 11). Stevin planteó un par de planos inclinados sobre los que se colocaba una cadena (Figura 11 (izquierda)). ¿Permanecería la cadena en reposo? ¿O moverse hacia la izquierda, porque hay más masa en ese lado? ¿O moverse hacia la derecha, porque el plano de ese lado es más empinado? Stevin argumentó que los planos permanecerían en reposo porque, imaginando que la cadena continúa en un circuito cerrado (Figura 11 (derecha)), la fuerza hacia la izquierda equilibraría la fuerza hacia la derecha: hacer lo contrario implicaría la invención de una máquina de movimiento perpetuo. La teoría ideada para la mecánica a partir de este experimento fue que, para dos planos inclinados de igual altura, entonces pesos iguales actuarán inversamente proporcionales a las longitudes de los planos.
 |
| Figura 11. Plano inclinado de Simon Stevin |
Galileo Galilei y el Plano Inclinado
El físico italiano Galileo Galilei no fue un hombre dado a realizar sus experimentos en público y prefería convencer mediante escritos en lengua vernácula (el latín), lo cual le permitía tener una difusión mucho más grande, llegando a todo tipo de personas. Entre los experimentos más conocidos de Galileo están los que realizó con el plano inclinado. Galileo estaba convencido de que, en un espacio completamente libre de aire, dos cuerpos en caída libre recorrerían distancias iguales en tiempos iguales sin importar su peso. Este supuesto, que asumía la existencia del vacío, era algo absurdo e impensable dentro del pensamiento aristotélico, en el cual la creación de un espacio sin aire era una absoluta contradicción. Sin embargo, aunque Galileo tendría que admitir la resistencia del aire al formular sus teorías sobre la caída libre de cuerpos, insistiría en que en un espacio ideal los cuerpos caerían al mismo tiempo si eran soltados desde una misma altura.
Para corroborar su hipótesis, y ya que la caída de un cuerpo ocurría de manera muy rápida y por lo tanto no se podía medir con los instrumentos de la época, Galileo recurriría a experimentos con planos inclinados en donde podría controlar la velocidad de caída de esferas de plomo con sólo ajustar el ángulo del plano (Figura 12). Con el uso de relojes hidráulicos Galileo trataría de calcular los tiempos en los cuales rodaban esferas de distintos pesos. Se cree que de esta manera Galileo concluiría su ley sobre cuerpos en caída libre y descubriría que este es uniformemente acelerado. También se argumenta que el plano inclinado llevaría a que Galileo pensara el movimiento parabólico como la suma de un movimiento horizontal y uno vertical totalmente independientes. Los experimentos de Galileo deben entenderse en la mayoría de los casos como “experimentos mentales” que sólo se realizaron en el ámbito teórico, es decir, son experimentos que desde un principio buscaban coincidir con la razón. Galileo fue el primero en postular las leyes del movimiento uniformemente acelerado con sus experiencias usando un plano inclinado.
En 1600, Galileo incluyó el plano inclinado en su análisis de máquinas simples en Le Meccaniche (“Sobre la mecánica”), mostrando su similitud subyacente con las otras máquinas como amplificador de fuerza. La ley del plano inclinado de Galileo es: “Y puesto que (...) la fuerza, para mover el peso, sólo necesita superar insensiblemente a la que lo sostiene, deducimos esta proposición universal: en el plano inclinado, la fuerza tiene la misma proporción con el peso que la perpendicular al horizonte por el extremo del plano con la longitud de este plano”.
") |
| Figura 12. Plano inclinado con “campanelle” utilizado por Galileo Galilei (Museo Galileo en Florencia, Italia) |
La ley del plano inclinado constituye un avance significativo de la ciencia galileana. Se utilizará, por ejemplo, para demostrar que los grados de velocidad adquiridos en los planos, con diferentes pendientes, pero de la misma altura, son iguales cuando el objeto móvil llega al plano horizontal, y que su valor depende únicamente de la altura del plano.
El Plano Inclinado en el Análisis Geotécnico
En el análisis geotécnico del comportamiento y de fallas en suelos y rocas, es común encontrar diferentes modelos geométricos y matemáticos basados en el plano inclinado, por ejemplo, el caso de una rotura planar en un depósito de rocas (Figura 13).
El desplazamiento a lo largo de un plano inclinado, constituye en el análisis geotécnico, el mecanismo de rotura más sencillo e intuitivo, que puede ser estudiado con relativa facilidad, considerando aspectos como la influencia del agua, la aparición de grietas de tracción o el desarrollo del concepto de cono de fricción (en geomecánica), que resultan fáciles de comprender, y pueden extrapolarse a mecanismos de rotura más complejos, en los que las demostraciones rigurosas son más difíciles de realizar.
 |
| Figura 13. Algunos modelos de análisis de deslizamiento en suelos y rocas basados en el plano inclinado |
En una falla de tipo planar, como la de un talud infinito, deben concurrir un conjunto de circunstancias tales como:
- El plano de discontinuidad debe tener suficiente tamaño a escala del talud y debe ser desconfinado por una excavación o un proceso de erosión, lo que sólo ocurre cuando el buzamiento del plano del talud es mayor que el de la discontinuidad; en el caso contrario, el talud sería cinemáticamente estable y no se podría desarrollar una rotura plana.
- Si la discontinuidad no es suficientemente extensa como para abarcar todo el talud, la rotura no se puede producir a menos que existan otras dos discontinuidades que permitan la formación de un bloque que estaría delimitado por las tres discontinuidades y la cara del talud.
- El rumbo del plano de discontinuidad por donde tiene lugar la rotura sea paralelo o casi paralelo al rumbo del plano del talud, con una desviación máxima de 20º.
El deslizamiento se presenta cuando las fuerzas tangenciales que se desarrollan en la superficie de rotura son mayores que las fuerzas resistentes. En ausencia de empujes de agua y de cohesión en la discontinuidad, la rotura plana se producirá cuando el buzamiento de ésta sea mayor que su ángulo de fricción, pero si existe cierta cohesión el talud puede ser estable a pesar que el ángulo de fricción sea menor que el buzamiento de la discontinuidad. Si la cohesión es nula, puede darse el caso de que se produzca el deslizamiento, debido al empuje del agua, aunque el ángulo de fricción sea mayor que el buzamiento de la discontinuidad.
En Geotextiles and Geomembranes (1985), Martin & Koerner presentaron el factor de seguridad contra la falla de un suelo de cobertura uniforme sobre un talud infinito (Figura 14) que incluye un geosintético de refuerzo. En Stability of soil layers on geosynthetic lining systems (1989), Giroud y Beech, presentaron un análisis detallado de los tres mecanismos involucrados en la estabilidad del sistema de capas de geosintético en pendiente:
- El ángulo de fricción de la interfaz a lo largo de la superficie de deslizamiento.
- El efecto de refuerzo del dedo del pie que resulta del ángulo de fricción interna de los componentes del suelo del sistema en capas, ubicado sobre la superficie de deslizamiento.
- La tensión proporcionada por el geosintético alto ubicado sobre la superficie de deslizamiento.
") |
| Figura 14. Modelo de análisis de talud infinito incluyendo un geosintético, de Martin & Koerner (1985) |
En el caso de un deslizamiento del suelo superficial en presencia de una interfase con geotextil, el deslizamiento ocurriría dentro de la capa de suelo y no en la interfase. Sin embargo, si se considera una interfaz de geomembrana, el deslizamiento debe ocurrir en la interfaz ya que la fricción es menor que la resistencia al corte del suelo. Una adecuada compactación puede aumentar el ángulo de resistencia al corte y asegurar la estabilidad del suelo en el sistema de cobertura.
Continúa en la segunda parte …

Diseño: PatoMOP

2022
Comentarios
Publicar un comentario
Bienvenidos, agradezco sus comentarios ...